Sneel Biomimetic Robotic Kinetic Sculptures
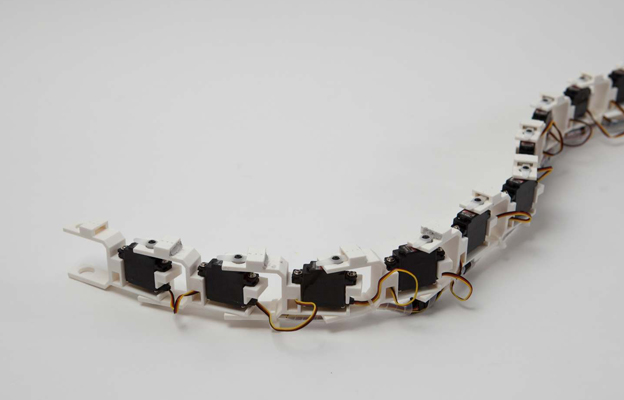
Sneel is a series of biomimetic robotic kinetic sculptures that resemble snakes, constructed to explore lifelike, sinuous motion in an aquatic robot. They are designed to navigate unknown territory and extreme terrain. Through the Sneel series, Levine explored new methods of fabrication using custom 3D printed joints, developed an easily replicable assembly process, and ventured into new methods of sinuous actuation.
Sneel is a biomimetic, locomotive robot. The electromechanical design of Sneel mimics the structure and motion of a real water snake, as a test to explore swimming behavior in an undulating linear robot. The inspiration for Sneel originates from a fascination with reptilian forms of motility and the implications of modelling hardware from biological structures and functions. Sneel uses a custom-written software library to propagate an oscillating wave down a line of servo motors that comprise the robot’s body. The current model is a platform for the development of other low-cost snake drones, with semi-autonomous navigational control for waypoint following, and sensing capabilities for obstacle avoidance.
32,639 thoughts on “Sneel Sculptures”